انرژي كارآمد مكانيزم تحملپذير خطا براي شبكههاي بيسيم سنسور
ایده اصلی مقاله: خوشهبندي يك توپولوژي كنترل كارآمد و پروتوكل ارتباط در شبكههايي سنسور ميباشد. با وجود اينكه سنسورها در محيطهاي ناامن مثل ميدان جنگ و جنگل و… گسترده شدهاند و محدوديتهاي از جمله محدوديت منابع و حجمكاري نامتوازن بين گرهها باعث شد كه خوشه آسيبپذير بوده و داراي خطا و اشتباه در ارتباط باشد. بنابراين نياز شديد جهت بهبود قدرت مكانيزمهاي تحملپذير خطاي در كاربردهاي واقعي شبكههاي سنسور است، در اين مقاله يك مكانيزم توزيع شده تحملپذير خطا براي شبكههاي سنسور پيشنهاد كرديم كه CMATO (مكانيزم تحملپذير خطا بر پايه عضو خوشه) ناميده شده است در اين ديدگاه خوشه، همچون يك شخص كامل برای نمايش نيازمنديهاي خوشه های دیگر و براي كشف ترميم خطاها با يك راه سريع و با انرژي كارآمد به كار ميرود. اين مكانيزم انعطافپذير براي متحد كردن طرحهاي خوشهبندي گوناگون موجود در شبكههاي سنسور ميشود. علاوه بر اين CMATO قادر به ترمیم برخی خرابيهاي سرخوشهها نيز ميباشد. بنابراين درCMATO ترميم خرابيهاي گرهها، سرخوشههاي چندتاي و خرابيهاي اتصالات در خوشه، بهبود هر چه بيشتر كارائي و قدرت تحملپذير خطا در شبكههاي سنسور كاربرد دارد. شبيهسازي نتيجه نشان ميدهد كه این مكانيزم كارائي بالايي براي ترميم خرابي سرخوشه و تحملپذير بودن خطا و مصرف بهینه انرژي نسبت به مكانيزمهاي موجود دارد.
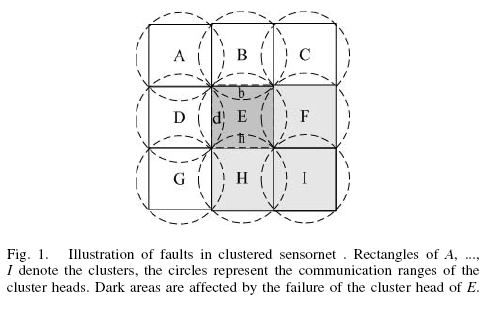
آنالیز مکانیزم: در شكل1 نشان داده شده وقتي كه سر خوشه E خراب شود كل خوشه در يك خرابي است و منجر به ناتواني فرستندههايش براي ارسال دادهها به بيرون خواهد شد. حتي بدتر زماني است كه بستههاي كوچك توليد شده توسط F و H و I از طريق E رله شوند. اين خوشهها نيز در يك وضعيت خرابي خواهند افتاد.
شکل 1
شکل 2
شکل 3
در مکانیزم CMATO گرههاي داخل خوشه موقع پردازش ارسالهای سرخوشههاي همسایه را استراق سمع ميكند. موقعيكه سرخوشه خراب ميشودو ارتباط ازسرخوشه قطع شود، اعضاء خوشه آن را كشف ميكنند، بايد بتواند خودشان را به خوشه مجاور براي ترميم انتقال دهد.
شكل2(a) گرهها در داخل يك خوشه به سرخوشه خودشانch و همسايه اين خوشه استراق سمع ميكنند. بنابراين اعضاء خوشه ميتوانند خرابي سر خوشه را سريع كشف كنند. در شكل2(b) وقتي همه گرهها از خرابي سرخوشه E اطلاع پيدا می کنند بعضي از گرهها (گرههاي واقع در حوزه خاكستري روشن) به خوشه همسايه متصل ميشوند در حالي كه ديگران (گرههاي واقع در حوزه خاكستري تاريك) به خوشه َE كه اخيراً ساخته شده متصل ميشوند از اين گذشته4حالت براي گرهها هستند:1ـ بدون خطا(Error-free) 2ـكشف خطا (error-detecting)3ـخـطـاي سـرخـوشـه (ch-error)4ـ خطـاي ميـانـي(medium-error) كه در شكل3 مشاهده ميكنيد. انتقال از حالت كشف خطا به بدون خطا، خطاي ch، يا خطاي مياني عبارت كشف خطا است. زماني كه از خطاي سرخوشه يا خطاي مياني به بدون خطا ميرويم عبارت ترميم خطا هست.
A ـ كشف خطا: كشف خطا اولين گام در مكانيزم تحملپذير خطا ميباشد ما كلاً در نظر ميگيريم كه خوشه خطاهاي خودش را ميتواند كشف كند. موارد زيادي هست كه اعضاء خوشه ميتوانند از وضعيت سر خوشهها اطلاع پيدا كنند. براي مثال وقتي كه اعضاء خوشه در حال ارسال است سرخوشه داده را حس ميكند.
در مكانيزم CMATO ، يك گره ارسالهاي سرخوشه همسايه را وقتي كه خوشه آن در حالت بدون خطا هست استراق سمع ميكند. اگر نتواند در هيچ فريم كوتاه يا نمايش بستهاي كوتاه زندگي سرخوشه آن را استراق سمع كند. پس ميتواند خطای پيدا كند. جهت انتقال به حالت كشف خطا بايد دريافتكنندهاش را باز نگهدارند، آن وقت اين گره مجبور است تصميم بگيرد آيا خرابي سرخوشه يا خطاي مياني علت شكستن ارتباط به سرخوشه شده؟
درCMATO يك مكانيزم مشاوره در خوشه براي طبقهبندي صحيح نوع خطاها استفاده ميكنيم. اگر بيشتر ازα درصد گرهها در خوشه براي كشف خرابي ارتباط به سرخوشه باشد. پس سر خوشه بايد خراب اعلان شود. حتي اگر سرخوشه خراب نشده باشد. اما بيشتر اعضاء خوشه نتوانند با سرخوشههاي آنها ارتباط برقرار كنند به اين خاطر خطاي مياني هست پس ما ميتوانيم به اين علت خطا را خرابي سرخوشه طبقهبندي كنيم، در اين صورت دليل خوبي براي انتخاب سر خوشه جديد ميباشد. CMATO از ليست غير فعال براي ارائه دوباره ليست اعضاي خوشه كه از سرخوشه قطع ارتباط كردند استفاده ميكند بنابراين ليست غير فعال انتشار و بروزرساني ميان اعضاء سرخوشه ميشود. اگر طول ليست بيشتر از C|| × α (|C| تعدادي از گرههاي عضو در خوشه C) باشد پس سرخوشه خراب اعلام ميشود.
خرابي سرخوشه توسط انتشار پيام ch-fail اعلام میشود. گرهي كه اين پيام را براي اولين بار دريافت ميكند خواهد توانست آن را فوراً رله بكند تا اينكه تمام اعضاي خوشه بتوانند بدانند كه سرخوشه خراب شده است اعضاء خوشه كه پيام ch-fail را دريافت كردند و ميتوانند سريعاً وارد فاز ترميم شوند. بعد از زماني فاصله اگر هيچ پيامي ch-fail انتشار نيافته باشد. پس قطع ارتباط به سرخوشهاش به علت خطای میانی می باشد.
B ـ ترميم خطاها: براي ترميم خطا هر گره يك مجموعه سرخوشه همسايه (NCH) نگهداري ميكند. در CMATO وقتي كه سرخوشهها با همديگر اتصال پيدا ميكنند اعضاء سرخوشه به راحتي ميتوانند سرخوشههاي مجاور را به NCHSشان اضافه كنند. براي مثال در شكل1 گرههايي كه در ناحيه b و f و h و d قرار دارند.
درخوشهE بايدسرخوشه B وF وH وD را درNCHS به ترتيب اضافه كنندوقتي كه اعضاء خوشه در ناحيههاي{b,f,h,d}سرخوشه E را پيدا كنند يا خراب يا اتصال به سرخوشه شكسته يا قطع شده است. آنها ميتوانند خودشان را به خوشه مجاور انتقال دهند بهرحالNCH گرهها در ناحيه)} {E–(b+f+h+d قرار ميگيرند بايد خالي شود. بنابراين سرخوشههاي جديد نياز به انتخاب جهت ترميم اين گرهها دارند.
1) ترميم خطاي میانی: این خطا اساس براي خرابيهاي سرخوشهها ميباشند. اگر عضو خوشه خطاي مياني را کشف كند براي اتصال به خوشههاي همسايه تلاش می كند. اگر مجموعه سرخوشههاي همسايه خالي نباشد(|NCH|≥1). آن فقط پيام درخواست اتصال را به بهترين سرخوشه همسايه ميفرستد. با دريافت اين پيام ، سرخوشه مجاور ميتواند پيام تصديق اين پيام و براي دريافت داده از اين گره آماده کند. بنابراين اين گره ترميم شده است. اگر مجموعه سرخوشه همسايه خالي باشد.(|NCH|=0) پس عضو خوشهاي براي انتخاب يك گره از همسايههايش همچون گره رله هست از ميان اين عضو خوشه ميتواند داده را به سرخوشه ارسال كند. ترميم سرخوشه مجاور بهتر از رله گره ميباشد . زيرا بيدار ماندن باعث ساختن گره رله ميشود. كه آن گره سرخوشه بوده است. اين روش خواهد توانست تعداد سرخوشهها را افزايش دهد. و تداخل ميان خوشهها را افزايش دهد. وقتي كه چندين خطاي میانی در شبكه اتفاق ميافتد.
2 ـ ترميم خطاي سرخوشه(ch-error) :با خرابی سرخوشه همة عضوهاي خوشه توسط انتشار پيام ch- fail اطلاع پيدا ميكنند. اعضای خوشه ميتواند براي سرخوشه شدن با تابع وزن رقابت كند.
كهcim عضو خوشه mth خوشه Ci هست، |INbr| اندازه مجموع همسايه در خوشه است، |Ci| اندازه خوشه است. بنابراينعامل اتصال را نمايش ميدهد. Ecur(cim) انرژي باقيمانده از آن گره، Emax(ci)يك برآورد از ماكزيمم انرژي باقيمانده ميان گرهها در خوشه Ci هست بنابراين معيار انرژي را نمايش ميدهد .
بر طبق تابع وزن f وقتي يك گره تصميم به سرخوشه شدن ميگيرد يك پيام آگهي سرخوشه ch-adv انتشار ميدهد. با دريافت اين پيام گرهها ميتوانند تايمرشان از سرخوشههاي مناسب قطع كنند. موقعي كه سرخوشه جديد انتخاب شد عضو هاي سرخوشه خراب بايد يا NCHشان بروز شوند. و پيام درخواست اتصال به بهترين سرخوشهها در NCHSارسال كننديااگرNCHخالي باشد به گرههاي مجاور رله ميكند.
مزایا:مکانیزم CMATOبرای ترمیم خطا های دائمی درسمت سرخوشه بخوبی خطاهاي مياني، بين سرخوشه واعضاي خوشه عمل ميكند.
ايستگاه اصلي نياز به دانش عمومي و پيش برآورد، دربارة موقعيت گرهها بوسيله پردازش متمركز ندارد.
كشف و ترميم هر دو به طور موضعي در زمان اجرا به كار ميافتند. شبيهسازي نتيجه نشان ميدهد كه CMATOميتواند در داخل الگوريتمهاي خوشهبندي موجود قرارگرفته براي كشف خطا در گرهها و سپس ترميم ديناميكي شبكه از خطا با انرژي كارآمد به كار رود.
معایب: وقتي كه چندين خطاي میانی در شبكه اتفاق ميافتد؛ برای ترمیم بيدار ماندن باعث ساختن گره رله ميشود و تعداد سرخوشهها و تداخل ميان آنها را افزايش می دهد.
پارامترهای به کار رفته در این مکانیزم: این مکانیزم در زمان اجرا اقدام به کشف و ترمیم می کند پس پارامتر در دسترس بودن تحمل پذیرخطا را تحت تأثیر قرار می دهد.
شبیه سازی: CMATO را در محيط J-sim پيادهسازي شده. در اين آزمايشات صد گره به طور تصادفي در محیطی به ابعاد200×200مترمربع گسترش داديم كه گره sink در مكـان (0,0) قرار داده شده است. شبكه با استفاده از LEACH وHEED خوشهبندي شده سرخوشهها در درخت پوشا براي مسيريابي سازمان يافتهاند. سرعت انتخاب سر خوشه 0.2 است. و محدوده خوشه 50متر ميباشد. براي تست رفتار شبكه خطاها را به شبكه تزريق ميكنيم. براي هر سرخوشه اگر Kth خطا در زمان Tk وارد شود. سپس زمان ورود به صورتX1 = T,Xk=Tk–Tk-1 , for K=2,3,… تعريف ميشود.
فرض كنيدXi مستقل است به طور همانندي متغيرتصادفي توزيع شده است وبه توزيعنمايي كلاسيك با نرخ λتعلق داردfTi(t)= λe– λt,t>0
طبق منبع [14] جريان زمان ورودي {x1,x2,x3,…} در واقع شكل فرآيند پواسون است λ مساوي E(xi) كه مقدار پيشبيني شده xi است. ظاهراً بزرگتر از λ مكرراً خطا اتفاق ميافتد. بنابراين عضو خوشه زماني كه حجم كاريش كوچكتر از سرخوشه است. ما λ اش را 10 زمان مساوي با λ سر خوشه قرار ميدهيم. وقتي خطاي سرخوشه اتفاق ميافتاد فرض ميكنيم خرابي ابدي است و سرخوشه از هر كدام از اتصالها به گرههاي ديگر قطع شده است. وقتي خطاي میانی اتفاق ميافتاد در عضو سرخوشه اتصال از عضو خوشه به سرخوشه قطع شده است. همه خرابيها گرهها فعالند و همه اتصالات شكسته شده دوباره اتصال مييابند. بعد از آخرين خطا براي rts × 6.2 كه rts چرخش زمان محدود را مشخص ميكند.
مورد مقایسه:CMATOرا در هر دو پروتوكلHEEDوLEACH پيادهسازي كرديم با توليد خطا در شكل4 كارائي CMATO با CHATOوقتيλ = 800 و rts=2000s است مقايسه كرديم.CMATO ميتواند خرابيهاي سرخوشه را كشف و ترميم كند در حالي كه %87 خطاها در CHATO كشف ميشود علاوه بر اين CMATO قادر به ترميم همه خطاهاي میانی است. در حاليكه CHATO هيچ مكانيزم براي ترميم خطا ندارد بنابراين در شكل 5 ما تنها خطاهاي خرابي سرخوشه را جهت مقايسه بيشتر كارايشان تزريق كرديم.
λنرخ پواسون را براي مقايسه تغيير ميدهيم. وقتي كه خطاها كم هستند(λ≥3200)شبكه توسط هر دو روش ترميم ميشود. و وقتيكه به طور مكرر بيشتر ميشود بيشتر خطاي سرخوشهها در مكانيزمCHATOترميم نشدهاند. به اين دليلCHATO تنها ميتواند مقدار خطاي منفرد را كشف كند. وقتي چندين خطا در همان زمان اتفاق بيفتاد به احتمال زیاد خوشه همسايه درCHATO نميتواند كار بكند.
هزينه مكانيزم تحملپذير خطا شامل استراق سمع تغييرات كنترل پيام ميباشد. در شكل 6 هزينه انرژي CMATO را ميتوانيد ببينيد. تقريباً خطي با نرخ λ است. در صورتيكه براي مكانيزم CHATO وقتي خطاهاي بيشتر اتفاق بيافتد و سرخوشههاي بيشتري خراب می شوند، سرخوشههاي جديد درست نميشود. بنابراين سرخوشه مبني بر مكانيزم تحملپذير خطا مجبور هستند محدوده ارتباطشان براي نمايش ارتباط و ارتباطات داخلي خوشه گسترش يابند. بنابراين خط شيب CHATO عميقتر از CMATO است. انرژي مصرفي CMATO بيشتر از 60 درصد كمتر از CHATO وقتي كه λ≤ 400 است.
کارهای آتی: ندارد.
| فرمت فایل: Pdf مقاله ترجمه فارسی / فایل پی دی اف مقاله لاتین |
| حجم: 1.11 مگابایت |
| هزینه دانلود: 10 صلوات هدیه به روح حضرت فاطمه (س) و سلامتی و ظهور آقا امام زمان (عج) |