چکیده :
با پیشرفت روز افزون علم و فناوری همواره نیاز های جدید به وسایل و دستگاه های جدید تر جهت هماهنگی همه بخشهای صنعت با این پیشرفت ، به وجود می آیند. بدین منظور شناخت و طراحی راه کارها و وسایل جدید امری است اجتناب ناپذیر.از جمله این پیشرفت ها ساخت نوع جدید و پیشرفته تری از موتورهای الکتریکی به نام استپ موتور ها یا موتورهای پله ای است که با کاهش انواع هزینه ها در صناع کم کم جای مکانیزم های پیچیده مکانیکی را خواهند گرفت.در این مقاله سعی شده است تا بسیار مختصر و متناسب با محدودیت ها بزبانی ساده و قابل درک ساختار و نحوه کارکرد و کنترل موتورهای استپی بررسی و بیان شود.کارایی و امکانات یک استپ موتور بسیار بیشتر از انواع دیگر الکترو موتورها می باشد. بدین لحاظ که بسیاری مکانیزم ها و حالات مختلف چرخش را می توان از آنها گرفت و همچنین این که کنترل این موتور ها بسیار آسان تر از سایرین است به طوری که عمدتا به وسایل کنترل سرعت اضافی از قبیل ترمز های الکتریکی و مکانیکی نیازی ندارند.پس بر ماست تا با افزایش دانش خود در مورد این نوع کارامد از موتورهای الکتریکی سعی در استفاده هرچه بیشتر از امکانات آنها کنیم.
نحوه عملکرد پروژه بدین گونه است که ما می توانیم با تعیین مقدار زاویه و دادن آن مقدار از طریق کیبورد به موتور فرمان دهیم که چه مقداری به صورت راستگرد و یا چپگرد حرکت کند.
کاربرد های این پروژه متعدد می باشد، به عنوان مثال ما میتوانیم از این روش در اعمال پزشکی یا ربات های جراح استفاده کنیم. در صنعت نیز از این پروژه استفاده های گوناگونی میشود مثلا در صنعت خودرو سازی یا ریخته گری به عنوان بازوی مکانیکی کاربرد دارد ویا در صنعت ساخت هواپیما به عنوان کنترل کننده بال هواپیما و…
به طور خلاصه هر جا که نیاز به اتوماسیون صنعتی احساس شود این پروژه کاربرد زیادی دارد.
فهرست مطالب
فصل اول
- مقدمه
فصل دوم
- سخت افزار پروژه
- قطعات بکار رفته در پروژه
- میکرو کنترلر 8051
- استپر موتور
- کیبورد
- LCD
فصل سوم
- نرم افزار پروژه
- نرم افزارهای بکار برده شده در پروژه
- نرم افزار Keil
- نرم افزار Protues
- فلوچارت پروژه
فصل چهارم
- نتیجه گیری و جمع بندی
فصل اول
مقدمه :
با درک میدان های مغناطیسی و کشف آنکه می توان انرژی الکریکی را به انرژی مکانیکی تبدیل نمود تحولی عظیم در تاریخ بشری بوجود آمد ، بگونه ای که بشر روز به روز به تفکر و طراحی و ساخت وسایلی که بتوانند با استفاده از انرژی الکتریکی ، انرژی مکانیکی تولید نمایند روی آورد. از این رو انواع موتور های الکتریکی به صحنه وجود آمده و همچنان سیر تکمیلی خود را طی نمودند تا به امروز که می توان برای هر نوع کاربری ، نوع خاصی از موتورها را بکار برد. اما ساخت اسپ موتور با امکاناتی که به طراحان و سازندگان ماشین آلات میدهد ، به گونه ای برجسته سبب کاهش هزینه ها در همه زمینه ها می شود. یکی از چندین مزایای بسیار زیاد این نوع الکتروموتورها تبدیل مکانیزم های بسیار پیچیده مکانیکی ، به تنها یک محرک استپی می باشد. در ادامه با این پدیده جالب آشنا تر خواهیم شد.نحوه عملکرد پروژه بدین گونه است که ما می توانیم با تعیین مقدار زاویه و دادن آن مقدار از طریق کیبورد به موتور فرمان دهیم که چه مقداری به صورت راستگرد و یا چپگرد حرکت کند.
به طور خلاصه هر جا که نیاز به اتوماسیون صنعتی احساس شود این پروژه کاربرد زیادی دارد.
من در این مقاله سعی دارم که مطالبی نسبتا سودمند در مورد پروژه ی خود ارائه دهم. این مقاله در قالب چهار فصل می باشد.
در فصل دوم نحوه ی ارتباط سخت افزار های این پروژه را خواهیم دید. میبینیم که چه قطعاتی در این پروژه به کار رفته است.
در فصل سوم نیز به تشریح نرم افزاری پروژه می پردازیم و در فصل بعدی ترکیب نرم افزاری و سخت افزاری پروژه را داریم.
فصل دوم
سخت افزار
در این فصل ابتدا قطعات به کار رفته در این پروژه را نام می بریم و سپس به طور اختصار توضیحاتی راجع به هر یک و نحوه ی عملکرد آنها در پروژه ارئه می دهیم.
قطعات سخت افزار های به کار رفته در این پروژه عبارتست از :
- میکرو کنترلر سری 8051
- استپر موتور یا موتور پله ای
- LCD
- کیبورد 4*3
تشریح قطعات و نحوه عملکرد آنها در پروژه:
1-2 ) میکرو کنترلر 8051 :
در اين بحث با ميكرو كنترلر8051 آشنا مي شويد. ميكرو كنترلرها و ميكرو پرسسورها با هم تفاوتهايي دارند. ميكروكنترلرها علاوه بر دارا بودن پردازشگر مركزي مدارات جانبي آن را نيز دارند اين مدارات شاملROM ، RAM، ارتباط سري، ارتباط موازي، زمان سنج و كنترل كننده وقفه مي شود. البته امكانات فوق در مقايسه با امكانات يك كامپيوتر كامل ناقص به نظر مي رسد ولي در كاربردهايي كه تنها بعضي ازامكانات مورد نياز باشد استفاده از ميكروكنترلرها سادهتر و مقرون به صرفهتر است ميكروكنترلرها بيشتر كاربرد كنترلي دارند. يعني با دريافت يك ورودي، كنترل چند فرايند را بدست ميگيرند كه عمدتاً اين كارها ساده است ولي در كار بردهايي كه احتياج به تحليل و پردازش پيچيده و عميق دارد به ميكرو پرسورها نياز است.
MCS-51 دسته اي ازميكروكنترلرها است كه ابتدا توسط شركت Intel ساخته وبه بازار جهاني عرضه شده اند. هر يك از ميكروكنترلرهاي اين خانواده امكانات ويژهاي دارند. در اين بخش مشخصات سخت افزاري 8051 معرفي مي شود.

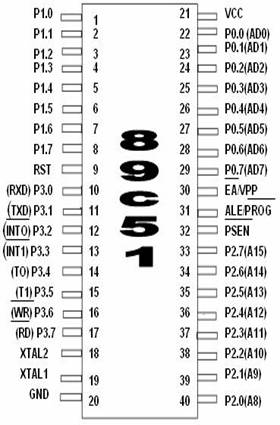
(شکل 1) (شکل 2)
در شکل 1 شمائی از پایه های یک میکرو کنترلر 8051 و در شکل 2 شماوی واقعی از یک میکرو کنترلر 8051 بیست پایه می بینیم.
2-2) موتور پله ای:
نحوه ی عملکرد موتور پله ای
در این بخش قصد دارم راجع به موتورهای پله ای (Stepper Motor) که بخش مکانیکی و نیروی  محرکه پروژه را تشکیل خواهد داد، توضیحاتی بنویسم.
محرکه پروژه را تشکیل خواهد داد، توضیحاتی بنویسم.
| زاويه پله | پله در دور |
| 0.72 | 500 |
| 1.8 | 200 |
| 2.0 | 180 |
| 2.5 | 144 |
| 5.0 | 72 |
| 7.5 | 48 |
| 15 | 24 |
استپ موتور هم برگرفته از اسم آن یک نوع موتور می باشد مثل موتورهای DC که تولید حرکت دورانی می کند. با این تفاوت که استپ موتورها دارای حرکت دقیق و حساب شده هستند. این موتورها به صورت درجه ای دوران می کنند و با درجه های مختلف در بازار موجود هستند.
در واقع واژه پله به معنی چرخش به اندازه درجه تعریف شده موتور می باشد. مثلا استپ موتوری با درجه ۱.۸ باید ۲۰۰ پله انجام بده تا ۳۶۰ درجه یا یک دور کامل بچرخه (۱.۸×۲۰۰ = ۳۶۰) و یک استپ با درجه ۱۵ فقط باید ۲۴ پله برای یک دور کامل انجام بده (۲۴×۱۵=۳۶۰ ). این ویژگی فوائد بسیار زیادی دارد از جمله امکان کنترل سرعت.
تفاوت موتور dc و موتور پله ای:
موتور DC وقتی به منبع ولتاژ متصل میشود از یک سرعت آرام شروع به حرکت میکند و شتاب می گیردو با قطع کردن ولتاژ، شتاب منفی می گیرد و معلوم نیست چند ثانیه بعد از قطع ولتاژ از چرخش بایستد. با این تفاسیر فکر می کنید در هارددیسک یا دیسکت درایوها ویا ویدئو ها از کدوم موتور استفاده می کنند؟ در رباتیک بسته به نوع شرائط از هر دو نوع موتور استفاده میشود.
موتورهای پله ای موجود در بازار معمولا دونوع ۵ یا ۶ سیمه دارند . این استپ موتورها قیمت بالایی نیز دارند.
تشریح سیم بندی موتور پله ای:
در مدل ۵ تایی فقط یک سیم مشترک (COM) وجود داره ولی در مدل ۶ تایی ۲ سیم مشترک وجود دارد که باید به ولتاز وصل شوند. یعنی در هر دو در آخر فقط ۴ تا سیم باقی می ماند که کاربردآنها را در ادامه توضیح خواهم داد.
نحوه تست سالم بودن موتور پله ای:
برای اینکار در مرحله اول باید مطمئن شویم هیچکدام از سیمها به هم اتصال ندارند. حالا با دست شفت رو بچرخانید، می بینید که راحت و روان می چرخه! حالا تمام سیم ها رو به هم اتصال بدید و سعی کنید دوباره شفت رو با دست بچرخانید، اگر یه مقاومت یا سفتی نسبت به حالت قبل احساس کردید بدانید که حتما موتور سالم می باشد! (بدون نیاز به هیچ منبع تغذیه)
یافتن ترتیب صحیح سیمها:
پیدا کردن این ترتیب خیلی مهمه و اگر رعایت نشود موتور ما به طور صحیح نخواهد چرخید و ما را دچار اشتباه می کند. برای اینکار ابتدا سیم (یا سیمهای) مشترک رو به ولتاژ مورد نیاز موتور (روی بدنه موتور می باشد ولی معمولا ۱۲ ولت) وصل می کنیم. بعد از میان۴ تا سیم باقیمانده یکی رو انتخاب می کنیم و سر منفی یا زمین منبع رو به اون اتصال می دهیم. اینکار باعث یه چرخش کوچیک میشه. یه کاغذ گرد یا یه تیکه چوب به شفت میبندیم تا چرخش های ریز معلوم بشه. این چرخش کوچیک در واقع همان یک پله موتور به اندازه زاویه موتور می باشد. حالا سر منفی یا GNDرا به یکی از ۳ تا سیم دیگر اتصال میدهیم. اگر از این ۳ تا سیم، سیم صحیح رو انتخاب کرده باشید یه گردش کوچیک (به اندازه قبلی) در ادامه حرکت قبلی می بینید ولی اگر خطا باشد گردش معکوس یا بیش از حد (۲ یا ۳ پله) خواهید داشت. اگر سیم خطا
بود دوباره زمین رو به سیم اول اتصال می دهیم و همان کار را با ۲ سیم دیگر تکرار می کنیم تا زمانی که سیم صحیح پیدا شود. وقتی سیم صحیح پیدا شد سیم اول رو کنار می گذاریم و مراحل رو از اول برای سه سیم باقی مانده انجام می دهیم تا ترتیب ۴ تا سیم رو پشت سر هم پیدا کنیم
نحوه کنترل موتور پله ای:
حالا اگر این چهارتا سیم رو به ترتیب صحیح کنار هم قرار بدهیم و سر منفی منبع رو به ترتیب به طور مداومبه انها وصل کنیم، می بینیم که موتور -هرچند دست و پا شکسته- شروع به چرخش می کند! (البته باید ترتیب سیمها کاملا صحیح باشد).
حالا فرض کنیم چهار تا سیم رو به صورت چهار بیت -بیت فقط میتونه ۰ یا ۱ باشه- در نظر بگیریم و ۱ شدن هر کدام به معنی اتصال آن به GND باشد.مثلا ۰۰۰۱ یعنی سیم اول گراند شده و ۰۱۰۰ یعنی سیم سوم گراند شده.
| سیم۱ | سیم۲ | سیم ۳ | سیم ۴ | شماره پله |
| 0 | 0 | 0 | 1 | 1 |
| 0 | 0 | 1 | 0 | 2 |
| 0 | 1 | 0 | 0 | 3 |
| 1 | 0 | 0 | 0 | 4 |
این قسمت فقط پیش زمینه ای بود برای درک نحوه کنترل استپ.
اگر چهار پله d, c ,b ,a رو که هر کدوم به صورت چهار بیت در جدول نشان داده شده را به صورت مداوم به یک استپ موتور القا کنیم، باعث حرکت منظم موتور در یک جهت خواهیم شد. این نوع القا بیتها،حرکت یک بیتی نام داره. یعنی در هر پله فقط ۱ بیت روشن یا ۱ هست. در ضمن القا بیت ها طبق این جدول و جداول بعدی مرحله جدایی هست که باید با توسط میکرو انجام بگیرد.
| سیم۱ | سیم۲ | سیم ۳ | سیم ۴ | شماره پله |
| 1 | 0 | 0 | 1 | 1 |
| 0 | 0 | 1 | 1 | 2 |
| 0 | 1 | 1 | 0 | 3 |
| 1 | 1 | 0 | 0 | 4 |
نوع دیگری از القا پله به موتور وجود داره که حرکت دوبیتی نام دارد.
همانطور که در جدول می بینید در این نوع حرکت در یک پله همزمان دوبیت ۱ هستنداگر این مدل را مانند بالایی به صورت مداوم تکرار کنیم باز هم باعث چرخش موتور خواهیم شد اما در این حالت گشتاور و جریان موتور نزدیک ۲ برابر خواهد شد. افزایش گشتاور به معنی افزایش قدرت چرخانندگی (نه سرعت چرخش) هست.
| سیم۱ | سیم۲ | سیم ۳ | سیم ۴ | شماره پله |
| 0 | 0 | 0 | 1 | 1 |
| 0 | 0 | 1 | 1 | 2 |
| 0 | 0 | 1 | 0 | 3 |
| 0 | 1 | 1 | 0 | 4 |
| 0 | 1 | 0 | 0 | 5 |
| 1 | 1 | 0 | 0 | 6 |
| 1 | 0 | 0 | 0 | 7 |
| 1 | 0 | 0 | 1 | 8 |
نوع دیگری از القا پله به استپ موتور وجود دارد به نام حرکت نیم پله :
همانطور که از اسم آن پیداست این مدل باعث چرخش موتور به اندازه نیم پله خواهد شد. مثلا اگر زاویه موتوری ۱.۸ درجه هست هر پله از این مدل باعث چرخش موتور به اندازه ۰.۹ درجه خواهد شد. از ویژگی های این روش افزایش حساسیت استپر موتور ما می باشد.
لازم به ذکراست که اگر بیت های این سه جدول رو از بالا به پایین القا کنیم موتور در جهت ساعتگرد و اگر از پایین به بالا اجرا کنیم در جهت پادساعتگرد خواهد چرخید.
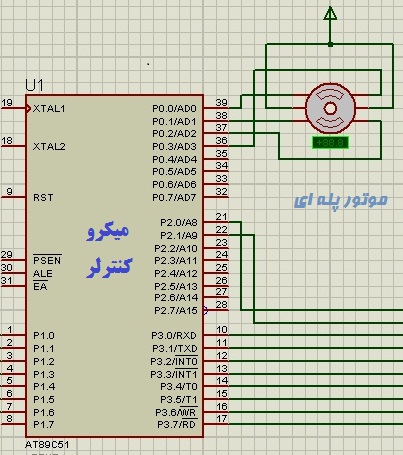
شماتیک نحوه ی ارتباط موتور به میکرو کنترلر در این پروژه :
در این پروژه موتور پله ای ما به پورت چهارم میکرو ، طبق شکل زیر متصل شده است.
2-3) کیبورد
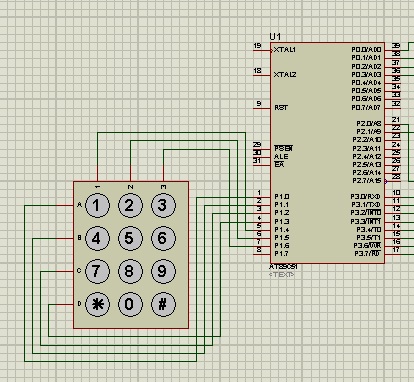 در این پروژه از یک کیبورد 4×3 برای دادن مقدار زاویه ی چرخش به موتور استفاده شده است. کلید های 1-9 برای دادن مقدار زاویه و برای دادن فرمان چپگرد یا راستگرد از کلیدهای ستاره و مربع استفاده شده است. کلید مربع (#) برای گردش به راست و کلید ستاره (*) برای گردش به چپ می باشد.
در این پروژه از یک کیبورد 4×3 برای دادن مقدار زاویه ی چرخش به موتور استفاده شده است. کلید های 1-9 برای دادن مقدار زاویه و برای دادن فرمان چپگرد یا راستگرد از کلیدهای ستاره و مربع استفاده شده است. کلید مربع (#) برای گردش به راست و کلید ستاره (*) برای گردش به چپ می باشد.
همانطور که در شکل مشاهده می کنید ، صفحه کلید ما به پورت 1 میکرو متصل شده است.
2-4) LCD :
صفحهنمایشمورداستفادهدراینپروژهیکLCD 2×16میباشدکهاینLCDدارای16پایهمیباشد.همانطورکهگفتماینlcdدارای 16 پایههستکهنامهریکازاینپایههابهترتیبزیراست.
تغذیهاینlcdبین 4.5 تا 5 ولتمیباشد.
1- vss (زمین)
2-vdd (مثبت)
3-VEE (برای تنظیم کنتراستlcd)
4- RS(انتخاب ثبات) RS=1 برای انتخاب ثبات داده و RS=0 برای انتخاب دستورالعمل ثبات فرمان
5- R/W (گذرگاه داده 8 بیت) R/W=1 برای خواندن و R/W=0 برای نوشتن است.
6- E یا Enable (برای لچ کردن اطلاعات ارائه شده به پایه های داده اش استفاده می شود)
7- D0 تا D7(8 بیت خط داده برای ارسال اطلاعات به LCD)
8- پایه 15 ،آند led که برای روشنایی صفحهlcdمیباشد که باید به مثبت وصل شود.
9- پایه 16 ،کاتد led که باید به منفی (زمین ) وصل شود.
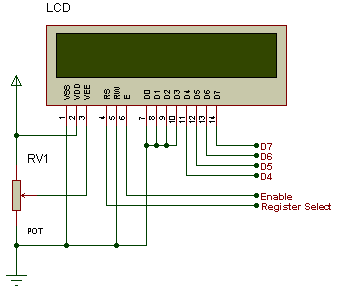
در نقشه بالا میبینید که یک پناسیومتر به پایه 3 وصل شده است که برای تغییر کنتراستlcdمیباشد این پناسیومتر را میتوانید 10کیلو یا 1کیلو انتخاب کنید وهمچنین در این نقشه پایه های 7و8و9و10 را به زمین وصل کرده ولی اگر هم وصل نکنید مشکلی نیست 6 پایه ای که اینور هستند باید به میکرو وصل کنیم و همچنین پایه های 16و15 در این نقشه نشان داده نشده که آند وکاتد led میباشند که همون طور که در بالا گفتم باید وصل شوند.